Intelligent Estimation Algorithms for Smart Mobility
1 Proposal’s Context, Positioning and Objectives
1.1 Objectives and research hypotheses
1.1.1 Context
The development of controllers with high performance and reliability for autonomous and connected vehicles will require real-time measurements or estimates of many variables on each vehicle [1]. Examples of variables that are needed for feedback include: longitudinal distances, velocities and accelerations of other nearby vehicles; lateral position of the vehicle in its own lane; vehicle yaw angle; slip angle; yaw rate; steering angle; lateral acceleration; and roll angle. There are also environmental variables which need to be measured such as tire-road friction coefficient, snow cover on road, and the presence of unexpected obstacles. Measurement of all of the above variables requires significant expense. Indeed, some of the sensors above, such as slip angle and roll angle, can be extremely expensive to measure, requiring sensors that cost thousands of dollars. For example the Datron optical sensor for measurement of slip angle has a price over 10ke. In addition, several variables cannot be measured due to unavailability of sensors (at any cost). Examples include positions, and accelerations of cars which are further upstream (e.g. lead car of a platoon). Only the position of the immediately preceding car ahead can currently be measured. Furthermore, autonomous and connected vehicle requires highly reliable sensors and actuators. Failure of any one sensor or actuator, due to faults, cyber-attacks or denial of service, can cause a disastrous accident. Hence reliable fault diagnostic and fault handling systems are also needed. Such systems cannot be based on hardware redundancy which requires many extra copies of the same sensors. Instead, they need to rely on estimation algorithms and analytical redundancy. For all the above reasons, the development of intelligent estimation algorithms is highly important for autonomous vehicles.
1.1.2 Objectives
Throughout this project we propose original ideas on estimation, which is a necessary and crucial step for reliability, resilience, and safety of connected and autonomous vehicles (CAVs). The overall objectives of the proposal consist in developing efficient estimation algorithms to reconstruct the unmeasurable state variables, which are required to design controllers and fault diagnostic schemes for CAVs. More specifically, the considered issues are safe and stable trajectory, estimation of faults in sensors and actuators, and cyber-attack detection. Below, we will describe the proposed ideas in detail.
1.1.2.a Learning-based neuro-adaptive observers for vehicle tracking
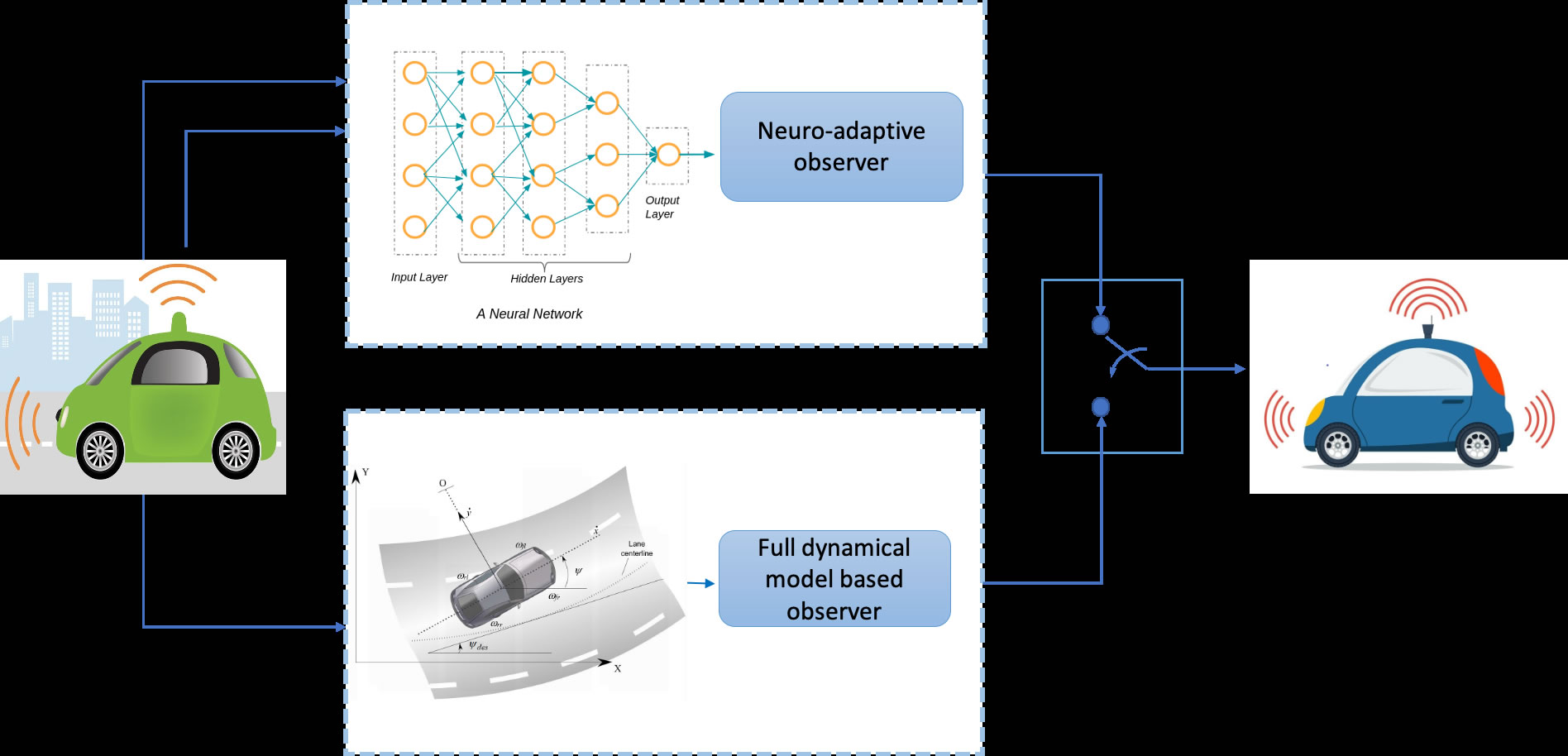
The idea we will explore in this project is the development and use of learning-based nonlinear observers. Several components on a vehicle (e.g. tires) have highly complex models whose parameters are difficult to obtain and also vary significantly with time. This proposal will therefore use a modeling approach consisting of a combination of physically meaningful differential equations and adaptive online-learning-based neural networks to represent the vehicle dynamics. In particular, well understood phenomena such as force balances, mechanical motion per Newton’s laws, aerodynamic drag, rolling resistance, road grade, combined acceleration terms for lateral and roll accelerations and road bank angle influence will be modeled using analytical differential equations. Tire models for both lateral and longitudinal forces, the friction circle, engine maps, and suspension stiffness and damping characteristics will be modeled using neural networks whose weights can be initially obtained using training via back-propagation. In addition to initial training, model parameters for the neural networks and a subset of parameters for the physically meaningful differential equations will also be updated automatically online during regular vehicle use. The strategy is depicted in Figure 1(a), where y1 represents measurements provided from radar reading and on-board sensors and y2 are informations arising from wireless communication.
 |
 |
| (a) Vehicle tracking /neuro-adaptive observer. | (b) Towards Artificial Intelligence based software sensors. |
| Figure 1: Intelligent estimation strategies for vehicle tracking. | |
The overall objective of this part is to develop the architecture for the combined modeling approach, to develop rigorous estimation algorithms for both parameter and state estimation, to enable dynamic changes in observer structure based on real-time vehicle maneuver and measurement availability and to validate the complete model and estimation system using data from CARSIM and from real vehicle experimental measurements provided by partners of the project. The above learning-based strategy requires significant new developments in estimation algorithms. It leads to several mathematical challenges that we describe in the developed methodology in Section 1.3.
1.1.2.b Towards intelligent estimation algorithms
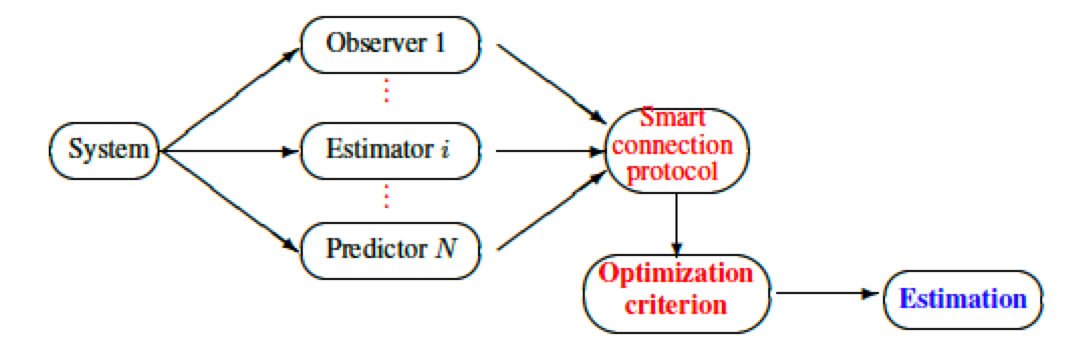
Another objective of this proposal consists in proposing a new and full system of software-enabled estimation algorithms to be included in many control strategies and diagnosis schemes to improve stability, reliability, and safety of connected vehicles. To this end, as depicted in Figure 1(b), the aim is to combine the nice properties of statistical predictors [2], model-based methods [3], neuro-adaptive observers [4, 5], and learning-based techniques like the extremum seeking algorithm [6] to enhance the estimation and increase resilience, performances, and robustness of any control strategy related to connected vehicles.
The challenge is to develop a smart connection protocol between the set of observers/estimators/predictors allowing the most accurate and reliable estimation. The combination of all these estimation techniques is worthily interesting for models with unknown inputs and/or unknown parameters. Among the problematics of autonomous and connected vehicles (in addition to the tracking problem mentioned above) where such intelligent estimation algorithms are crucial, we can cite the problem of cyber physical attacks or denial of service detection, disturbance and fault rejection, and data loss. Hence, estimating all the variables related to those factors may considerably increase resilience and reliability of interconnected vehicles. Due to the high sensitivity of autonomous vehicles to the above undesired factors, the development of smart estimation schemes is crucial and essential.
1.1.2.c Improving Resilience, Robustness, and Reliability of automated vehicles in a platoon
In the operation of interconnected vehicles, the network-based environment provides many advantages such as easy installation, maintenance with low cost, and high efficiency, so, combined with recent advanced communication technology, future controlled, connected vehicles are under network-based environment which also causes several undesired factors. These factors may be as follows:
- Disturbances and fault: faults of digital devices cause serious problems like degradation of system performance and even loss of human life. Therefore, the diagnosis of faults is needed by considering several engineering concepts like fault tolerant and fault diagnosis.
- Cyber-attacks: it is essential to develop some criteria for the vehicle systems to detect and counter cyberattacks. We aim to consider several cyber-attack architectures involving nonlinear dynamics.
- Data loss: the influence of packet dropout will be strong when packet dropout and sampling are simultaneously occurred because, if packet dropout is occurred at a sampling instant, data will be missing during a sampling period. Therefore, we prepare some solutions for this complex situation. Specifically for this issue, the use and development of new statistical predictors will be of great interest.
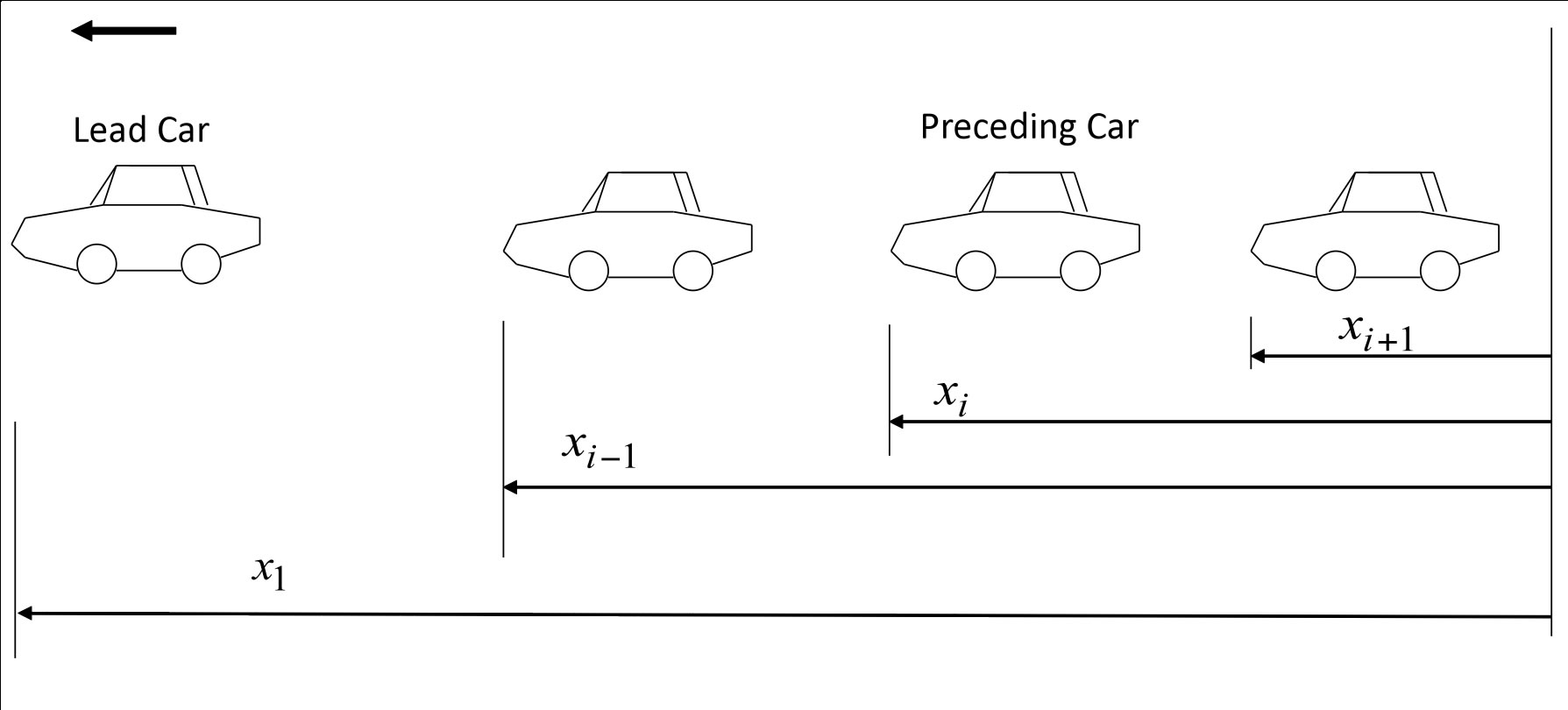
Until now, many existing works solved the above stated problems individually. In this project, we will work on a unified solution counteracting all factors caused by the presence of network-based environments. We will investigate stability of the interconnected vehicle systems subject to those network-based factors. The objective is to develop a comprehensive theory from estimation viewpoint to improve resilience, robustness, and reliability of a large class of (inter)-connected nonlinear vehicle dynamics. The investigation of learning-based or data-driven based estimation algorithms and combining Unknown Input Observers (UIO) with nonlinear approximators will be raised in this proposal. Indeed, due to the smartness of new integrated technologies, the use of artificial intelligence-based algorithms may help to improve estimation and thus resilience and reliability of control systems in smart mobility. Combining analytical model-based techniques with learning-based algorithms [4] and statistical predictors [2] will enhance significantly the estimation quality. Cars in a platoon (or cars in an arbitrary string of vehicles on a section of a highway) constitute interconnected dynamic systems, as depicted in Figure 2. The overall objective consists in developing complete Resilient Robust and Reliable (R3) control systems to face any problems in automated vehicles including vehicles operating in a platoon.
 |
 |
| (a) Cars in a platoon. | (b) Automated Highway Demonstration in 1997 with Platoon Buick Le Saber Cars. |
| Figure 2: Automated vehicles operating in a platoon. | |
If for any reason wireless communication links are lost or significantly disturbed with some cars (cyberattacks, sensor faults, or other external factors), but not with other cars, then estimation can be done by using the partial wireless signals obtained and making up for the wireless signals missed, to getR3−Controllers. This is especially possible because the radar signal of each car is also being transmitted by it wirelessly.